Кошик
SASIC 0664604 купить в Киеве, Украина
| Бренд | Назва | Наявність | Термін постачання | Ціна | Замовлення | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SASIC0664604 |  |
Пыльник тяги
Для оригінального номера: 406675
Сторона встановлення: передній міст |
| |||||||||
Аналоги для SASIC 0664604 | ||||||||||||
| IPD35-5093 | IPD 35-5093 |
Комплект пильника, рульове керування | Уточнити наявність | |||||||||
| AUTEX506098 | AUTEX 506098 |
Комплект пильника, рульове керування | Уточнити наявність | |||||||||
| DELPHITBR4165 |  |
Комплект пильника, рульове керування | Уточнити наявність | |||||||||
| VAICOV42-0221 |  |
Комплект пильника, рульове керування
Висота [мм]: 170
Внутрішній діаметр 1(мм): 21 Внутрішній діаметр 2 (мм): 58 Матеріал: Гума |
Уточнити наявність | |||||||||
| TOPRAN721 144 | 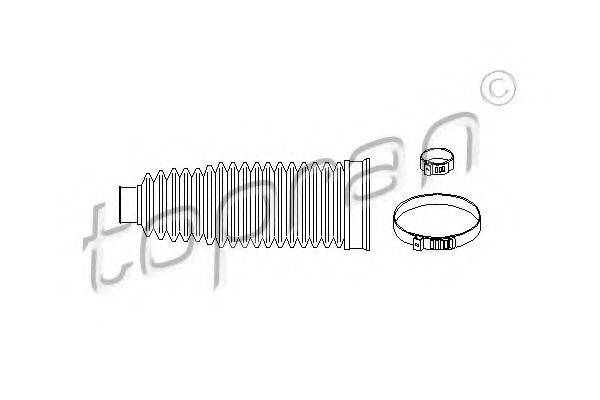 |
Комплект пильника, рульове керування
Внутрішній діаметр 1(мм): 21
Внутрішній діаметр 2 (мм): 58 Довжина [мм]: 170 Додатковий артикул / Додаткова інформація 2: із затискачами Кількість на вісь: 2 Матеріал: Гума Сторона встановлення: з обох сторін |
Уточнити наявність | |||||||||
| ORIGINAL IMPERIUM36283 |  |
Пильовик, рульове управління
Висота [мм]: 170
Діаметр 1 [мм]: 21 Діаметр 2 (мм): 58 Матеріал: Гума Оснащення / обладнання: для автомобілів з посиленим кермовим механізмом Сторона встановлення: передній міст |
Уточнити наявність | |||||||||
| CAUTEX030623 |  |
Комплект пильника, рульове керування
Висота [мм]: 170
Внутрішній діаметр 1(мм): 21 Внутрішній діаметр 2 (мм): 58 Додатковий артикул / Додаткова інформація 2: із затискачами Оснащення / обладнання: для автомобілів з посиленим кермовим механізмом Сторона встановлення: передня вісь, двосторонньо |
Уточнити наявність | |||||||||
| PEUGEOT406660 | PEUGEOT 406660 |
Пильовик, рульове управління
Для оригінального номера: 406675
Сторона встановлення: передній міст |
Уточнити наявність | |||||||||
| PEUGEOT406675 | PEUGEOT 406675 |
Пильовик, рульове управління
Для оригінального номера: 406675
Сторона встановлення: передній міст |
Уточнити наявність | |||||||||