Кошик
SEIM 102440 купить в Киеве, Украина
| Бренд | Назва | Наявність | Термін постачання | Ціна | Замовлення | |||
|---|---|---|---|---|---|---|---|---|
| SEIM102440 |  |
Трос, стоянкова гальмівна система
Довжина 1/довжина 2 [мм]: 500/260
Необхідна кількість: 1 Сторона встановлення: спереду |
Уточнити наявність | |||||
Аналоги для SEIM 102440 | ||||||||
| BENDIX432802B | |
Трос, стоянкова гальмівна система
Довжина [мм]: 533
Довжина кожуха [мм]: 290 Сторона встановлення: спереду |
Уточнити наявність | |||||
| MALO21326 | MALO 21326 |
Трос, стоянкова гальмівна система
Довжина 1/довжина 2 [мм]: 500/256
Сторона встановлення: спереду |
Уточнити наявність | |||||
| CABOR10.4736 | 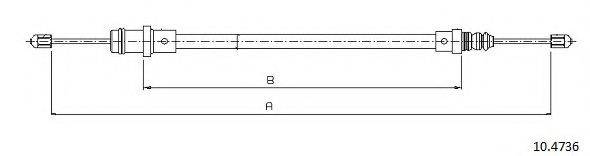 |
Трос, стоянкова гальмівна система
Довжина 1 [мм]: 395
Довжина кабелю [мм]: 500 |
Уточнити наявність | |||||
| CABOR491.1 | 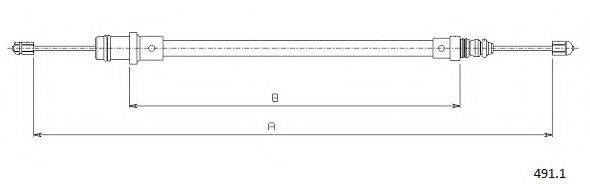 |
Трос, стоянкова гальмівна система
Довжина 1 [мм]: 256
Довжина кабелю [мм]: 500 Сторона встановлення: спереду |
Уточнити наявність | |||||
| LECOY0314 | LECOY 0314 |
Трос, стоянкова гальмівна система
Довжина [мм]: 500
Сторона встановлення: спереду Тип гальма: Диски/барабани |
Уточнити наявність | |||||
| CITROEN1400813180 | CITROEN 1400813180 |
Трос, стоянкова гальмівна система
Довжина 1/довжина 2 [мм]: 500/260
Необхідна кількість: 1 Сторона встановлення: спереду |
Уточнити наявність | |||||
| FIAT1400813180 | FIAT 1400813180 |
Трос, стоянкова гальмівна система
Довжина 1/довжина 2 [мм]: 500/260
Необхідна кількість: 1 Сторона встановлення: спереду |
Уточнити наявність | |||||
| PEUGEOT1400813180 | PEUGEOT 1400813180 |
Трос, стоянкова гальмівна система
Довжина 1/довжина 2 [мм]: 500/260
Необхідна кількість: 1 Сторона встановлення: спереду |
Уточнити наявність | |||||
| CITROEN474626 | CITROEN 474626 |
Трос, стоянкова гальмівна система
Довжина 1/довжина 2 [мм]: 500/260
Необхідна кількість: 1 Сторона встановлення: спереду |
Уточнити наявність | |||||
| PEUGEOT474626 | PEUGEOT 474626 |
Трос, стоянкова гальмівна система
Довжина 1/довжина 2 [мм]: 500/260
Необхідна кількість: 1 Сторона встановлення: спереду |
Уточнити наявність | |||||