Кошик
FARCOM 122131 купить в Киеве, Украина
| Бренд | Назва | Наявність | Термін постачання | Ціна | Замовлення | |||
|---|---|---|---|---|---|---|---|---|
| FARCOM122131 |  |
Приводний вал
Внутрішнє зубчасте з'єднання з боку колеса: 27
Гальмівна динаміка / динаміка руху: для автомобілів з ABS Діаметр 2 (мм): 110 Довжина [мм]: 525 Зовнішнє зачеплення з боку колеса: 38 Сторона встановлення: передній міст Число зубців кільця ABS: 48 |
Уточнити наявність | |||||
Аналоги для FARCOM 122131 | ||||||||
| KAGER13-6125 | KAGER 13-6125 |
Приводний вал
Гальмівна динаміка / динаміка руху: для автомобілів з ABS
Діаметр 2 (мм): 108 Довжина [мм]: 528 Зовнішнє зачеплення з боку колеса: 38 Кількість зубців: 48 |
Уточнити наявність | |||||
| QUINTON HAZELLT5056 | QUINTON HAZELL T5056 |
Приводний вал
Довжина [мм]: 525
Зовнішнє зачеплення з боку колеса: 38 Число зубців кільця ABS: 48 |
Уточнити наявність | |||||
| EAIT78103A | 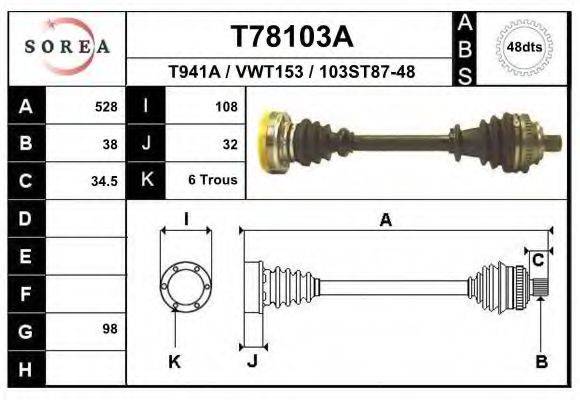 |
Приводний вал
Гальмівна динаміка / динаміка руху: для автомобілів з ABS
Діаметр 1 [мм]: 98 Діаметр 2 (мм): 108 Довжина [мм]: 528 Зовнішнє зачеплення з боку колеса: 38 Приводний вал: з кільцем ABS Число зубців кільця ABS: 48 |
Уточнити наявність | |||||
| SNRAV1411 | 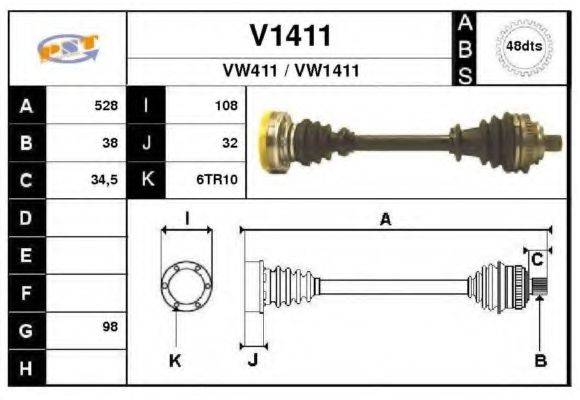 |
Приводний вал
Гальмівна динаміка / динаміка руху: для автомобілів з ABS
Діаметр 1 [мм]: 98 Діаметр 2 (мм): 108 Довжина [мм]: 528 Зовнішнє зачеплення з боку колеса: 38 Кількість зубців: 48 Приводний вал: з кільцем ABS |
Уточнити наявність | |||||
| SERAVW411 | 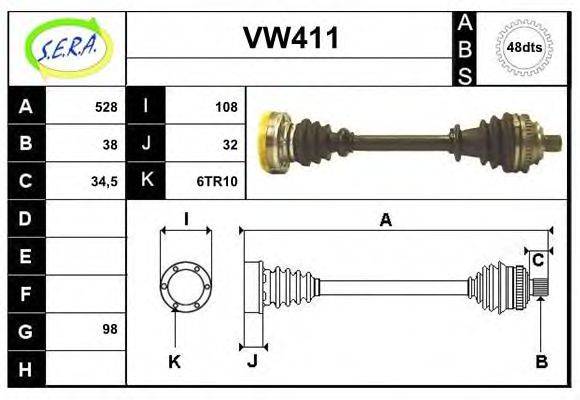 |
Приводний вал
Гальмівна динаміка / динаміка руху: для автомобілів з ABS
Діаметр 1 [мм]: 98 Діаметр 2 (мм): 108 Довжина [мм]: 528 Зовнішнє зачеплення з боку колеса: 38 Кількість зубців: 48 Приводний вал: з кільцем ABS |
Уточнити наявність | |||||
| VW701407271J | VW 701407271J |
Приводний вал
Внутрішнє зубчасте з'єднання з боку колеса: 27
Гальмівна динаміка / динаміка руху: для автомобілів з ABS Діаметр 2 (мм): 110 Довжина [мм]: 525 Зовнішнє зачеплення з боку колеса: 38 Сторона встановлення: передній міст Число зубців кільця ABS: 48 |
Уточнити наявність | |||||