Кошик
BOSCH 1987482358 купить в Киеве, Украина
| Бренд | Назва | Наявність | Термін постачання | Ціна | Замовлення | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| BOSCH1987482358 | 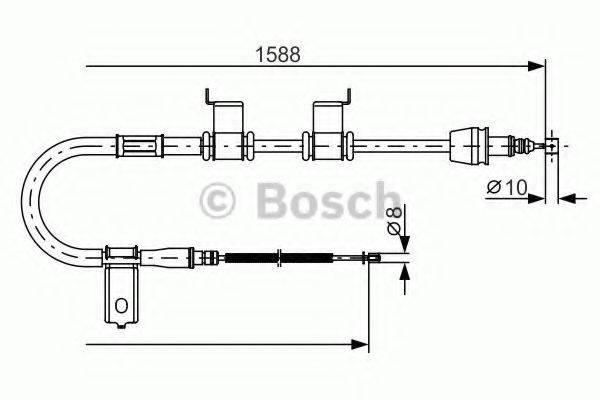 |
BOSCH HYUNDAI трос ручн.гальма лів.Accent,Kia Rio 05-
Довжина [мм]: 1588
|
| |||||||||||||
Аналоги для BOSCH 1987482358 | ||||||||||||||||
| QUINTON HAZELLBC4198 | QUINTON HAZELL BC4198 |
Трос, стоянкова гальмівна система
Довжина 1/довжина 2 [мм]: 1588/1318
|
Уточнити наявність | |||||||||||||
| HERTH+BUSS JAKOPARTSJ3920308 |  |
Трос, стоянкова гальмівна система
Довжина [мм]: 1605
|
Уточнити наявність | |||||||||||||
| MAGNETI MARELLI600000116810 |  |
Трос, стоянкова гальмівна система | Уточнити наявність | |||||||||||||
| A.B.S.K17127 |  |
Трос, стоянкова гальмівна система
Вага, кг]: 0,68
Необхідна кількість: 1 Сторона встановлення: ліворуч Сторона встановлення: позаду Тип гальма: Дисковий механізм |
Уточнити наявність | |||||||||||||
| KAGER19-6178 |  |
Трос, стоянкова гальмівна система
Довжина 1/довжина 2 [мм]: 1588/1318
Сторона встановлення: ліворуч |
Уточнити наявність | |||||||||||||
| BLUE PRINTADG046180 |  |
Трос, стоянкова гальмівна система
Вага, кг]: 0,720
Необхідна кількість: 1 Сторона встановлення: ззаду зліва |
Уточнити наявність | |||||||||||||
| ASHUKIHRK12703 |  |
Трос, стоянкова гальмівна система
Вага, кг]: 0,720
Необхідна кількість: 1 Сторона встановлення: ззаду зліва |
Уточнити наявність | |||||||||||||
| CABOR17.6035 | 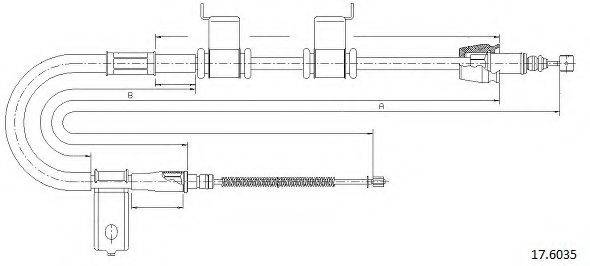 |
Трос, стоянкова гальмівна система
Довжина 1 [мм]: 1318
Довжина кабелю [мм]: 1588 Сторона встановлення: ззаду зліва |
Уточнити наявність | |||||||||||||
| COFLE17.6035 | 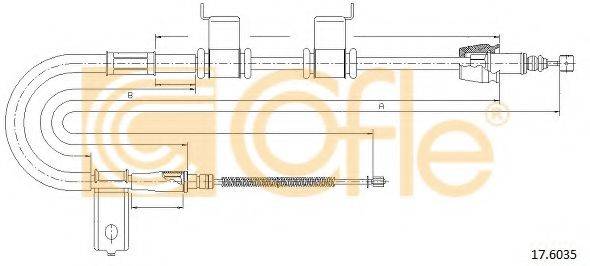 |
Трос, стоянкова гальмівна система
Довжина 1/довжина 2 [мм]: 1588/1318
Сторона встановлення: ліворуч Сторона встановлення: позаду |
Уточнити наявність | |||||||||||||
| BOSCHBC1242 | BOSCH BC1242 |
Трос, стоянкова гальмівна система
Довжина [мм]: 1588
|
Уточнити наявність | |||||||||||||
| KIA59760 1G300 | KIA 59760 1G300 |
Трос, стоянкова гальмівна система
Довжина [мм]: 1588
|
Уточнити наявність | |||||||||||||