Кошик
CEVAM 5244 купить в Киеве, Украина
| Бренд | Назва | Наявність | Термін постачання | Ціна | Замовлення | |||
|---|---|---|---|---|---|---|---|---|
| CEVAM5244 |  |
Приводний вал
Діаметр 1 [мм]: 90
Довжина [мм]: 582 Зовнішнє зачеплення із боку диференц.: 34 Зовнішнє зачеплення з боку колеса: 33 Сторона встановлення: ліворуч |
Уточнити наявність | |||||
Аналоги для CEVAM 5244 | ||||||||
| KAGER13-6950 | KAGER 13-6950 |
Приводний вал
Довжина [мм]: 582
Зовнішнє зачеплення із боку диференц.: 34 Зовнішнє зачеплення з боку колеса: 33 |
Уточнити наявність | |||||
| DA SILVA31205T |  |
Приводний вал
Гальмівна динаміка / динаміка руху: для автомобілів без ABS
Довжина [мм]: 580 Зовнішнє зачеплення із боку диференц.: 34 Зовнішнє зачеплення з боку колеса: 33 |
Уточнити наявність | |||||
| DA SILVAC31205 | |
Приводний вал
Гальмівна динаміка / динаміка руху: для автомобілів без ABS
Довжина [мм]: 580 Зовнішнє зачеплення із боку диференц.: 34 Зовнішнє зачеплення з боку колеса: 33 |
Уточнити наявність | |||||
| DEPA3334200 |  |
Приводний вал
Динаміка гальма/руху: не для ABS
Довжина [мм]: 928 Замінна частина: Зовнішнє зачеплення із боку диференц.: 33 Сторона встановлення: передній міст праворуч |
Уточнити наявність | |||||
| EAIT58097 | 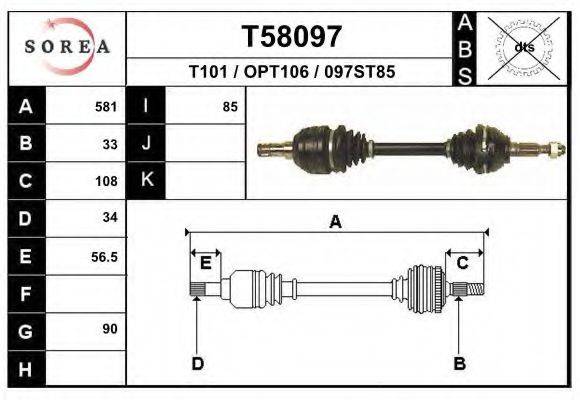 |
Приводний вал
Гальмівна динаміка / динаміка руху: для автомобілів без ABS
Діаметр 1 [мм]: 90 Діаметр 2 (мм): 91,5 Довжина [мм]: 582 Зовнішнє зачеплення із боку диференц.: 34 Зовнішнє зачеплення з боку колеса: 33 |
Уточнити наявність | |||||
| SNRAO1202 | 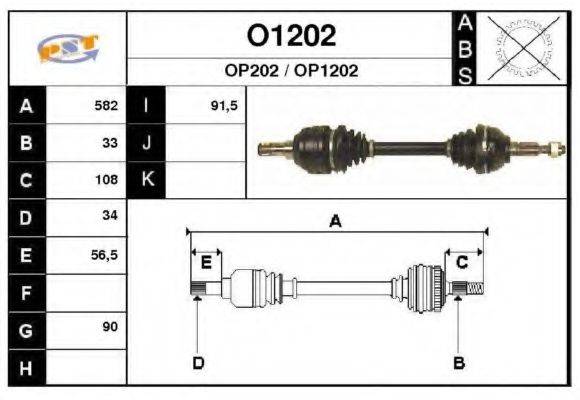 |
Приводний вал
Гальмівна динаміка / динаміка руху: для автомобілів без ABS
Діаметр 1 [мм]: 90 Діаметр 2 (мм): 91,5 Довжина [мм]: 582 Зовнішнє зачеплення із боку диференц.: 34 Зовнішнє зачеплення з боку колеса: 33 |
Уточнити наявність | |||||
| SERAOP202 | 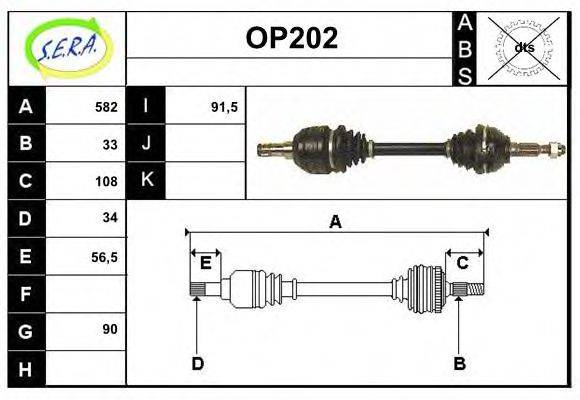 |
Приводний вал
Гальмівна динаміка / динаміка руху: для автомобілів без ABS
Діаметр 1 [мм]: 90 Діаметр 2 (мм): 91,5 Довжина [мм]: 582 Зовнішнє зачеплення із боку диференц.: 34 Зовнішнє зачеплення з боку колеса: 33 |
Уточнити наявність | |||||