Кошик
SPIDAN 83784 купить в Киеве, Украина
| Бренд | Назва | Наявність | Термін постачання | Ціна | Замовлення | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SPIDAN83784 | 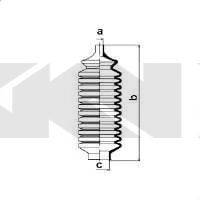 |
Пильовик, рульове управління
Висота [мм]: 168
Внутрішній діаметр 1(мм): 10 Внутрішній діаметр 2 (мм): 29 Додатковий артикул / Додаткова інформація 2: для сталевого хомута Матеріал: Гума |
Уточнити наявність | |||||||||||||
Аналоги для SPIDAN 83784 | ||||||||||||||||
| LEMFORDER30143 01 |  |
Пильовик, рульове управління
Внутрішній діаметр 1(мм): 9
Внутрішній діаметр 2 (мм): 29 Довжина [мм]: 168 Матеріал: Гума Сторона встановлення: передній міст Сторона встановлення: справа |
| |||||||||||||
| IPD35-6043 | IPD 35-6043 |
Комплект пильника, рульове керування
Висота [мм]: 168
Внутрішній діаметр 1(мм): 10 Внутрішній діаметр 2 (мм): 29 Матеріал: Гума |
Уточнити наявність | |||||||||||||
| AUTEX507048 | AUTEX 507048 |
Комплект пильника, рульове керування
Висота [мм]: 168
Внутрішній діаметр 1(мм): 10 Внутрішній діаметр 2 (мм): 29 Матеріал: Гума |
Уточнити наявність | |||||||||||||
| QUINTON HAZELLQG1216 |  |
Комплект пильника, рульове керування | Уточнити наявність | |||||||||||||
| MAPCO17571 |  |
Пильовик, рульове управління
Висота [мм]: 168
Внутрішній діаметр 1(мм): 10 Внутрішній діаметр 2 (мм): 29 Матеріал: Гума Парні номери артикулів: 17570 |
Уточнити наявність | |||||||||||||
| NIPPARTSN2845001 | 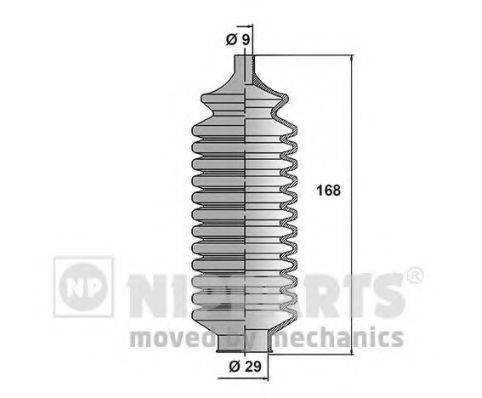 |
Комплект пильника, рульове керування
Висота [мм]: 168
Внутрішній діаметр 1(мм): 9 Внутрішній діаметр 2 (мм): 29 |
Уточнити наявність | |||||||||||||
| STELLOX14-72002-SX |  |
Пильовик, рульове управління
Висота [мм]: 168
Внутрішній діаметр 1(мм): 9 Внутрішній діаметр 2 (мм): 29 Сторона встановлення: ліворуч |
Уточнити наявність | |||||||||||||
| MERCEDES-BENZMB347364 | MERCEDES-BENZ MB347364 |
Пильовик, рульове управління
Висота [мм]: 168
Внутрішній діаметр 1(мм): 10 Внутрішній діаметр 2 (мм): 29 Додатковий артикул / Додаткова інформація 2: для сталевого хомута Матеріал: Гума |
Уточнити наявність | |||||||||||||