Кошик
HELLA 8AK355701201 купить в Киеве, Украина
| Бренд | Назва | Наявність | Термін постачання | Ціна | Замовлення | |||
|---|---|---|---|---|---|---|---|---|
| HELLA8AK355701201 |  |
Трос, управління зчепленням
Вага, кг]: 0,27
Довжина 1 [мм]: 655 Довжина 2 [мм]: 385 Номер технічної інформації: AK0120 Регулювання / встановлення: з ручним регулюванням |
Уточнити наявність | |||||
Аналоги для HELLA 8AK355701201 | ||||||||
| ATE24.3728-0845.2 | 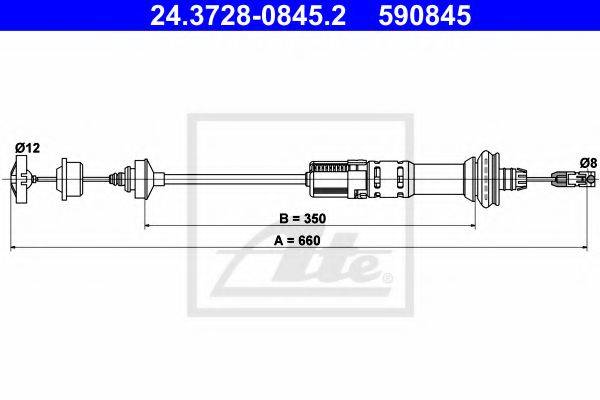 |
Трос, управління зчепленням
Довжина [мм]: 660
Код MAPP у наявності: Регулювання / встановлення: з автоматичним регулюванням |
Уточнити наявність | |||||
| TRWGCC1741 |  |
Трос, управління зчепленням
Довжина [мм]: 680
Регулювання / встановлення: з автоматичним регулюванням |
Уточнити наявність | |||||
| A.B.S.K27430 |  |
Трос, управління зчепленням
Вага, кг]: 0,36
Регулювання / встановлення: з автоматичним регулюванням |
Уточнити наявність | |||||
| JP GROUP4170200709 |  |
Трос, управління зчепленням
Автомобіль з ліво-/правостороннім розташуванням керма: для лівостороннього розташування керма
Довжина [мм]: 680 |
Уточнити наявність | |||||
| JP GROUP4170202109 |  |
Трос, управління зчепленням
Автомобіль з ліво-/правостороннім розташуванням керма: для лівостороннього розташування керма
Довжина [мм]: 680 |
Уточнити наявність | |||||
| HELLAAK0120 | HELLA AK0120 |
Трос, управління зчепленням
Вага, кг]: 0,27
Довжина 1 [мм]: 655 Довжина 2 [мм]: 385 Номер технічної інформації: AK0120 Регулювання / встановлення: з ручним регулюванням |
Уточнити наявність | |||||
| CITROEN2150X3 | CITROEN 2150X3 |
Трос, управління зчепленням
Вага, кг]: 0,27
Довжина 1 [мм]: 655 Довжина 2 [мм]: 385 Номер технічної інформації: AK0120 Регулювання / встановлення: з ручним регулюванням |
Уточнити наявність | |||||
| PEUGEOT2150X3 | PEUGEOT 2150X3 |
Трос, управління зчепленням
Вага, кг]: 0,27
Довжина 1 [мм]: 655 Довжина 2 [мм]: 385 Номер технічної інформації: AK0120 Регулювання / встановлення: з ручним регулюванням |
Уточнити наявність | |||||