Кошик
JAPANPARTS KB070 купить в Киеве, Украина
| Бренд | Назва | Наявність | Термін постачання | Ціна | Замовлення | |||
|---|---|---|---|---|---|---|---|---|
| JAPANPARTSKB070 |  |
Комплект пильника, приводний вал
Висота [мм]: 77
Діаметр 1 [мм]: 19 Діаметр 2 (мм): 67 |
Уточнити наявність | |||||
Аналоги для JAPANPARTS KB070 | ||||||||
| NIPPARTSJ2860307 | NIPPARTS J2860307 |
Комплект пильника, приводний вал
Висота [мм]: 88
Діаметр 1/діаметр 2 [мм]: 20/70 |
Уточнити наявність | |||||
| HERTH+BUSS JAKOPARTSJ2866004 | 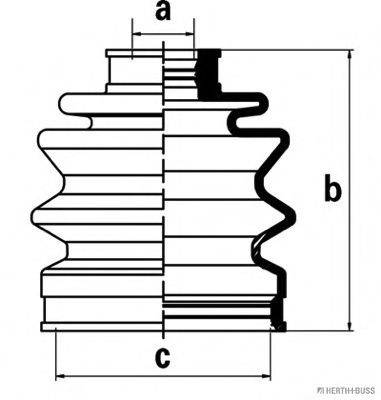 |
Комплект пильника, приводний вал
Висота [мм]: 88
Внутрішній діаметр 1(мм): 20 Внутрішній діаметр 2 (мм): 70 Матеріал: NBR (бутадієн-нітрильний каучук) |
Уточнити наявність | |||||
| MAGNETI MARELLI600000064990 | 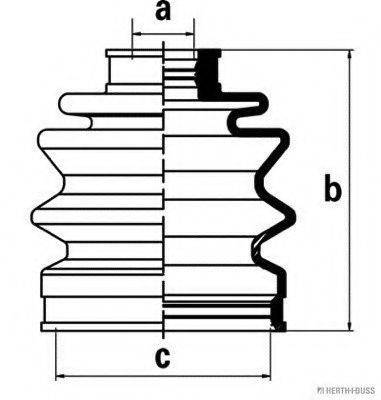 |
Комплект пильника, приводний вал | Уточнити наявність | |||||
| ASHIKA63-00-070 |  |
Комплект пильника, приводний вал
Висота [мм]: 77
Діаметр 1 [мм]: 19 Діаметр 2 (мм): 67 |
Уточнити наявність | |||||
| JP GROUP3843600219 |  |
Комплект пильника, приводний вал
Діаметр 1/діаметр 2 [мм]: A=19 / C=67,5
Довжина [мм]: 84 Матеріал: Гума |
Уточнити наявність | |||||
| JP GROUP5243600119 |  |
Комплект пильника, приводний вал
Діаметр 1/діаметр 2 [мм]: A=20 / C=70
Довжина [мм]: 88 Матеріал: Гума |
Уточнити наявність | |||||
| BLUE PRINTADD68118 |  |
Комплект пильника, приводний вал
Вага, кг]: 0,236
Внутрішній діаметр: 23 Внутрішній діаметр: 83 Матеріал: термопласт Необхідна кількість: 1 Сторона встановлення: з боку колеса Сторона встановлення: передній міст Товщина [мм]: 145 |
Уточнити наявність | |||||
| MDRMOB-8070 | MDR MOB-8070 |
Комплект пильника, приводний вал
Вага, кг]: 0,2
Висота [мм]: 77 Висота упаковки [см]: 15,5 Діаметр 1 [мм]: 19 Діаметр 2 (мм): 67 Довжина упаковки [див.: 11 Ширина упаковки [см]: 11 |
Уточнити наявність | |||||
| DAIHATSU04438-87401 | DAIHATSU 04438-87401 |
Комплект пильника, приводний вал
Висота [мм]: 77
Діаметр 1 [мм]: 19 Діаметр 2 (мм): 67 |
Уточнити наявність | |||||