Кошик
KAWE RT02185 купить в Киеве, Украина
| Бренд | Назва | Наявність | Термін постачання | Ціна | Замовлення | |||
|---|---|---|---|---|---|---|---|---|
| KAWERT02185 |  |
Трос, стоянкова гальмівна система
Вага [г]: 468
Тип гальма: Дисковий механізм |
Уточнити наявність | |||||
Аналоги для KAWE RT02185 | ||||||||
| FERODOFHB431266 | FERODO FHB431266 |
Трос, стоянкова гальмівна система
Вага, кг]: 0.468
Довжина 1 [мм]: 1480 Довжина 2 [мм]: 1190 Необхідна кількість: 2 Тип гальма: Диски/барабани |
Уточнити наявність | |||||
| SPIDAN41974 | |
Трос, стоянкова гальмівна система
Вага [г]: 432
Внутрішня довжина [мм]: 1500 Зовнішня довжина [мм]: 1230 Тип гальма: Дисковий механізм |
Уточнити наявність | |||||
| JURID431266J | JURID 431266J |
Трос, стоянкова гальмівна система
Вага, кг]: 0.468
Довжина 1 [мм]: 1480 Довжина 2 [мм]: 1190 Необхідна кількість: 2 Тип гальма: Диски/барабани |
Уточнити наявність | |||||
| BENDIX431266B |  |
Трос, стоянкова гальмівна система
Довжина [мм]: 1505
Довжина кожуха [мм]: 1190 Необхідна кількість: 2 Сторона встановлення: ззаду зліва Сторона встановлення: ззаду праворуч Тип гальма: Барабанний механізм Тип гальма: Дисковий механізм |
Уточнити наявність | |||||
| A.B.S.K11126 |  |
Трос, стоянкова гальмівна система
Вага, кг]: 0,5
Необхідна кількість: 2 Сторона встановлення: ліворуч Сторона встановлення: позаду Сторона встановлення: справа Тип гальма: Дисковий механізм |
Уточнити наявність | |||||
| REMKAFLEX46.1580 |  |
Трос, стоянкова гальмівна система
Вага [г]: 432
Внутрішня довжина [мм]: 1500 Зовнішня довжина [мм]: 1230 Тип гальма: Дисковий механізм |
Уточнити наявність | |||||
| CABOR11.6582 | 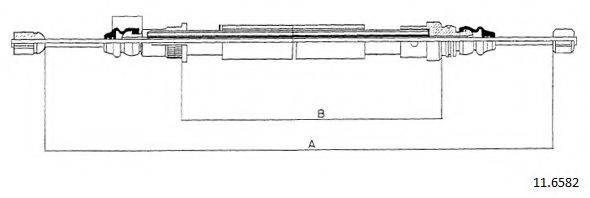 |
Трос, стоянкова гальмівна система
Довжина 1 [мм]: 1190
Довжина кабелю [мм]: 1480 Сторона встановлення: ліворуч Сторона встановлення: позаду Сторона встановлення: справа |
Уточнити наявність | |||||
| RENAULT7700802686 | RENAULT 7700802686 |
Трос, стоянкова гальмівна система
Вага [г]: 468
Тип гальма: Дисковий механізм |
Уточнити наявність | |||||