Кошик
SKF VKJP2109 купить в Киеве, Украина
| Бренд | Назва | Наявність | Термін постачання | Ціна | Замовлення | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SKFVKJP2109 | 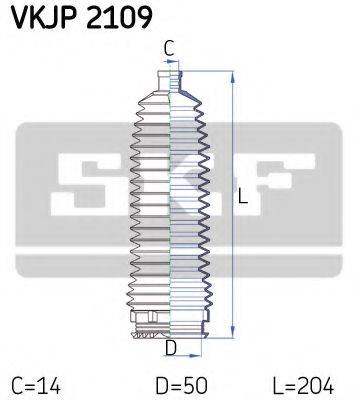 |
Комплект пильника, рульове керування
Висота [мм]: 204
Внутрішній діаметр 1(мм): 14 Внутрішній діаметр 2 (мм): 50 Матеріал: термопласт |
Уточнити наявність | |||||||||
Аналоги для SKF VKJP2109 | ||||||||||||
| FEBI BILSTEIN21603 |  |
Комплект пильника, рульове керування
Вага, кг]: 0,210
Необхідна кількість: 2 Сторона встановлення: передня вісь, двосторонньо |
| |||||||||
| FEBI BILSTEIN21457 |  |
Комплект пильника, рульове керування
Вага, кг]: 0
|
Уточнити наявність | |||||||||
| SWAG55 92 1603 |  |
Комплект пильника, рульове керування
Вага, кг]: 0,210
Необхідна кількість: 2 Сторона встановлення: передня вісь, двосторонньо |
Уточнити наявність | |||||||||
| SKFVKN 401 | SKF VKN 401 |
Комплект пильника, рульове керування
Висота [мм]: 204
Внутрішній діаметр 1(мм): 14 Внутрішній діаметр 2 (мм): 50 Матеріал: термопласт |
Уточнити наявність | |||||||||
| VOLVO272418 | VOLVO 272418 |
Комплект пильника, рульове керування
Висота [мм]: 204
Внутрішній діаметр 1(мм): 14 Внутрішній діаметр 2 (мм): 50 Матеріал: термопласт |
Уточнити наявність | |||||||||
| VOLVO8663288 | VOLVO 8663288 |
Комплект пильника, рульове керування
Висота [мм]: 204
Внутрішній діаметр 1(мм): 14 Внутрішній діаметр 2 (мм): 50 Матеріал: термопласт |
Уточнити наявність | |||||||||
| VOLVO8663289 | VOLVO 8663289 |
Комплект пильника, рульове керування
Висота [мм]: 204
Внутрішній діаметр 1(мм): 14 Внутрішній діаметр 2 (мм): 50 Матеріал: термопласт |
Уточнити наявність | |||||||||
| VOLVO9173611 | VOLVO 9173611 |
Комплект пильника, рульове керування
Висота [мм]: 204
Внутрішній діаметр 1(мм): 14 Внутрішній діаметр 2 (мм): 50 Матеріал: термопласт |
Уточнити наявність | |||||||||
| VOLVO9173612 | VOLVO 9173612 |
Комплект пильника, рульове керування
Висота [мм]: 204
Внутрішній діаметр 1(мм): 14 Внутрішній діаметр 2 (мм): 50 Матеріал: термопласт |
Уточнити наявність | |||||||||